Cos'è SprutCAM X Robot
Perchè scegliere SprutCAM X Robot
SprutCAM X Robot è un CAD/CAM che racchiude in un unico ambiente la programmazione CNC offline e la simulazione robotica ottimizzata dei robot industriali. I vantaggi nell'adottare questa soluzione sono davvero tanti e di seguito riportiamo i più eclatanti.
Stop ai periodi di inattività
I periodi di inattività del robot impattano fortemente sulla produttività e sui costi di programmazione. Grazie a SprutCAM X Robot sarete in grado ridurli drasticamentedi e potrete impostare, simulare e programmare il prossimo “job” mentre il robot sta lavorando.
Risparmio di tempo
La programmazione offline con SprutCAM X Robot è decisamente più veloce che quella “live” a bordo macchina, inoltre permette di programmare mentre il robot sta lavorano.
Più assi con facilità
Aggiungere assi in modo faceile e veloce permette di snellire la programmazione di celle robotiche con tavole rotanti o ad esempio robot su rotaia.
Il lavoro noioso lo fa il computer
Tutte le attività che comportano lavori lunghi e noiosi, come ad esempio l’ottimizzazione automatica delle movimentazioni, il calcolo di movimenti esenti da collisioni e la ricerca del percorso ideale, possono essere automatizzati in SprutCAM X Robot.
Realistico e nativo
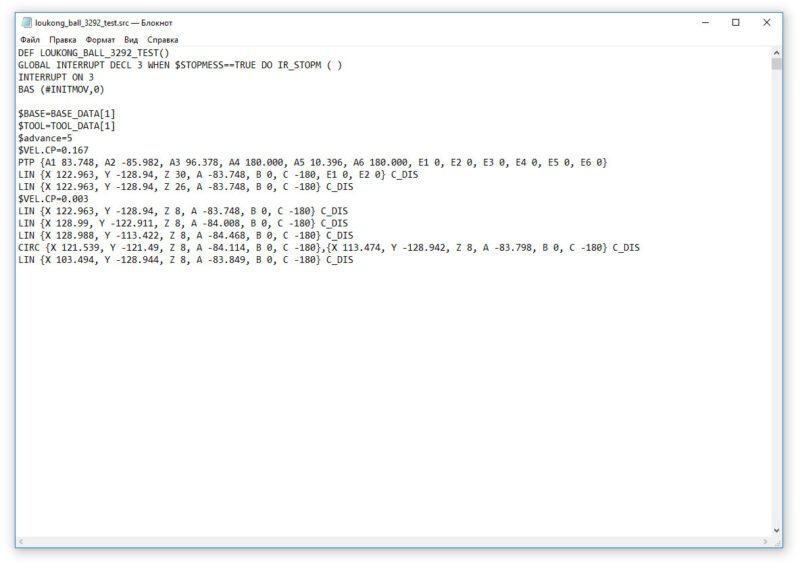
SprutCAM X Robot è in grado di simulare e verificare virtualmente la lavorazione in modo del tutto realistico e generare il codice NC nativo del robot.
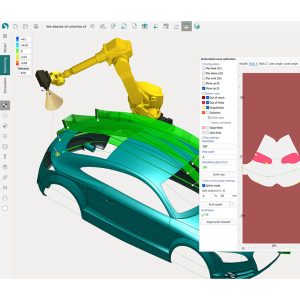
Flusso di lavoro senza eguali
Calcolo del percorso utensile, ottimizzazione, simulazione, post-processing tutto in un unico ambiente.
Tutti i percorsi utensile vengono generati tenendo conto della cinematica del robot specifico. Ciascuno degli assi del robot può essere ottimizzato automaticamente o manualmente per estendere la zona di copertura, evitare collisioni o migliorare le condizioni di lavorazione.
Overview sulle applicazioni disponibili
I robot antropomorfi vengono ormai utilizzati per le più svariate attività produttive e SprutCAM X Robot è già pronto per affrontarne la maggior parte.
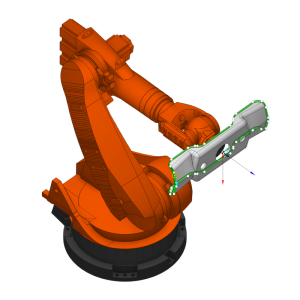
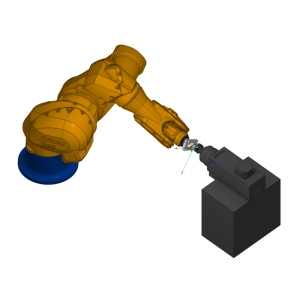
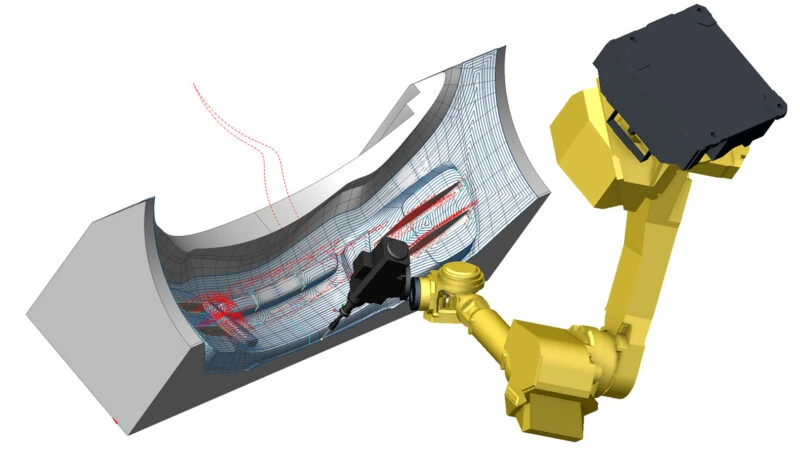
Fresatura
Fresatura 3-5D con supporto di assi ridondanti.
Taglio
Taglio Miltiaxis con controllo vettoriale preciso dell’utensile.
Additivo
Rivestimento 3-5D con controllo avanzato dello spessore degli strati.
Saldatura
Soluzione semplice e facile da usare per la programmazione della saldatura.
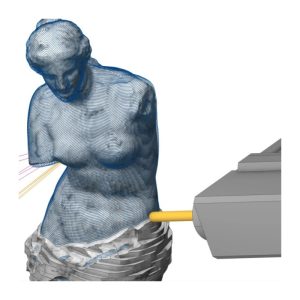
Scultura
Sgrossatura a pietra, strumento a disco, finitura 5D avanzata per i modelli mesh.
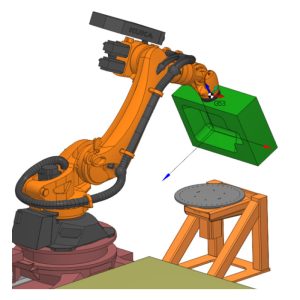
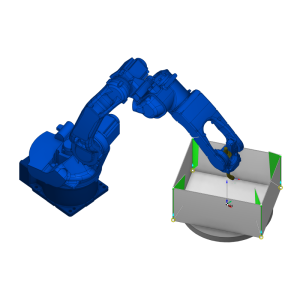
Pick-and-Place
Pick-and-place automatico senza collisioni
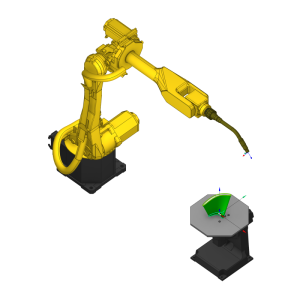
Verniciatura a spruzzo
Simulate e testate la vostra pittura sul PC. SprutCAM Robot vi fornirà tutto ciò di cui avete bisogno.
Lucidatura
Supportato da strumento a strumento e da pezzo a pezzo
Caratteristiche principali di SprutCAM X Robot
Calcolo del percorso utensile
È disponibile una vasta gamma di strategie per percorsi utensile che funzionano direttamente con modelli 3D per la parte e il pezzo.
Percorsi utensile di sgrossatura: sgrossatura parallela, equidistante, ad alta velocità, adattiva, piano di sgrossatura, sgrossatura a rotazione, sgrossatura e molto altro.
Percorsi utensile di finitura: linea di galleggiamento di finitura, piano, pettine (passaggio costante 3D), morph, lavorazione rotativa, superficie a 5 assi.
Percorsi utensile per contornatura: Contorno 2 assi, 3 assi e 5 assi.
Ottimizzazione
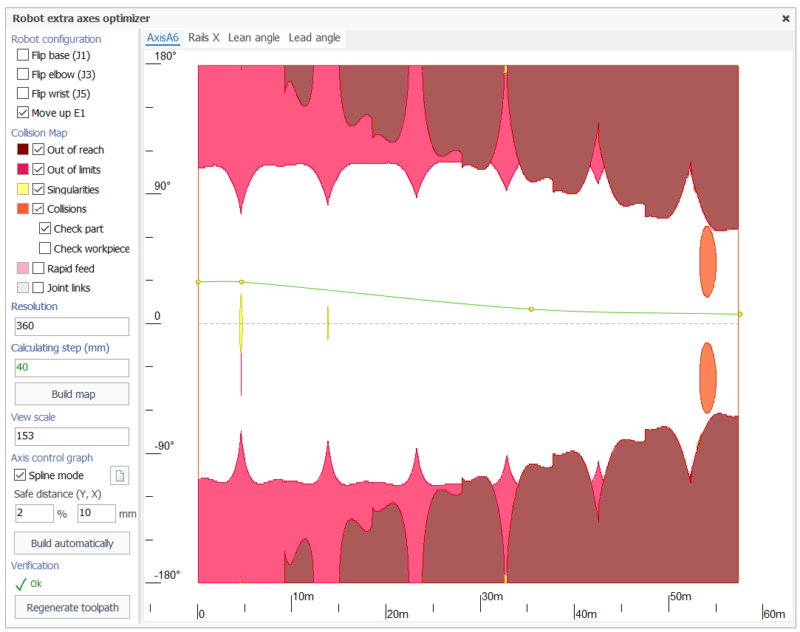
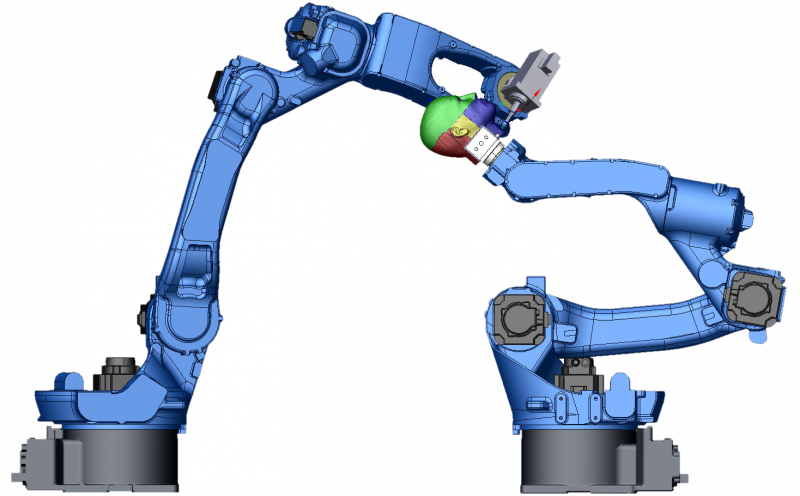
Grazie al potente strumento “la mappa degli assi del robot” è possibile gestire: singolarità, collisioni, limiti della zona di portata e movimenti ridondanti degli assi.
Assi disponibili nella mappa degli assi del robot: A6 (6° asse), rotaie, tavola rotante, angoli di piombo e di inclinazione.
Cosa viene mostrato sulla mappa: Fuori dalla portata, fuori dai limiti, singolarità, collisioni. La mappa mostra anche il percorso dell’utensile con avanzamenti rapidi e di lavoro.
Automatizzato: Basta premere “Costruisci automaticamente”. Funziona nella maggior parte dei casi.
Controllo preciso: Modifica qualsiasi punto del percorso utensile con anteprima di simulazione in tempo reale.
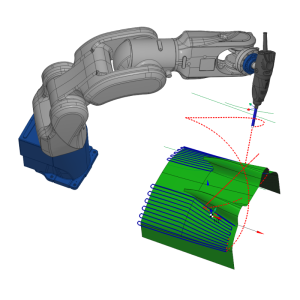
Simulazione
Al fine di ottenere un percorso privo di errori è possibile effettuarne la simulazione dettagliata in ogni movimento già all’interno di SprutCAM X Robot.
La simulazione in SprutCAM X Robot include:
- simulazione precisa e reale della cinematica dei robot,
- simulazione di rimozione materiale,
- rilevamento meccanico delle collisioni,
- rilevamento tallonamenti sulla parte,
- singolarità del robot e rilevamento della zona fuori dalla portata.
Flusso di lavoro unico
Il flusso di lavoro di programmazione dei robot in SprutCAM X Robot consente una programmazione robot industriale più rapida e fornisce una breve curva di apprendimento.
Software di programmazione robot all-in-one: calcolo del percorso utensile, ottimizzazione, simulazione e verifica, post produzione.
Libreria
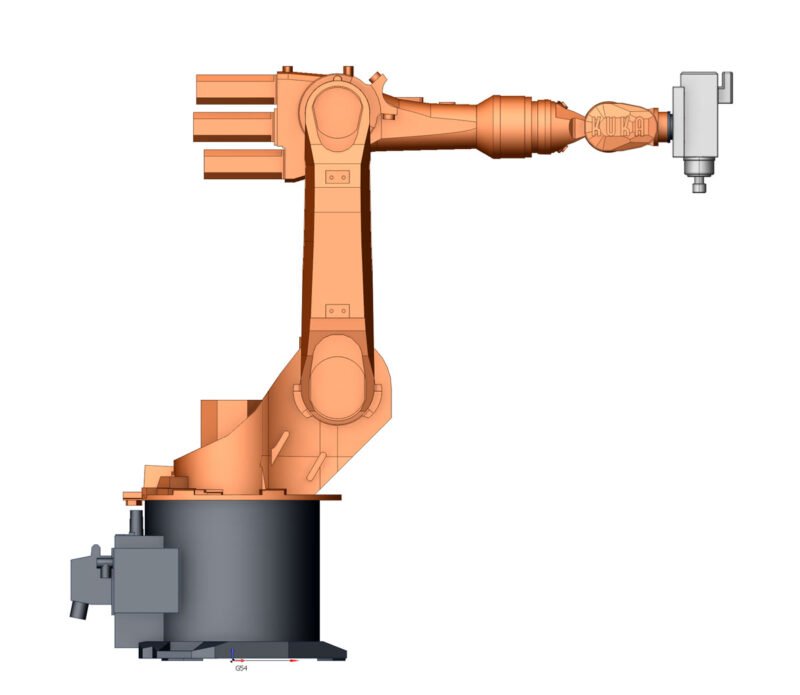
La libreria di cinematiche macchina di SprutCAM X Robot include di default una vasta gamma di robot dei principali produttori.
Ecco un assaggio di alcuni brand inclusi nella libreria:
Fanuc, KUKA, Staubli, Yaskawa Motoman, Toshiba, Mitsubishi, Nachi, ABB, COMAU ecc. Inoltre, i modelli standard consentono la creazione rapida di schemi cinematici personalizzati per robot e celle robotizzate.
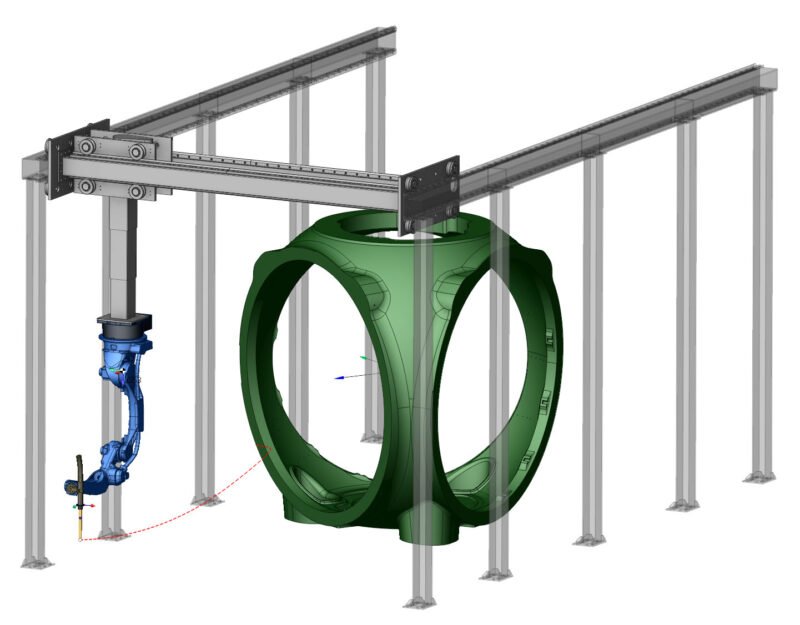
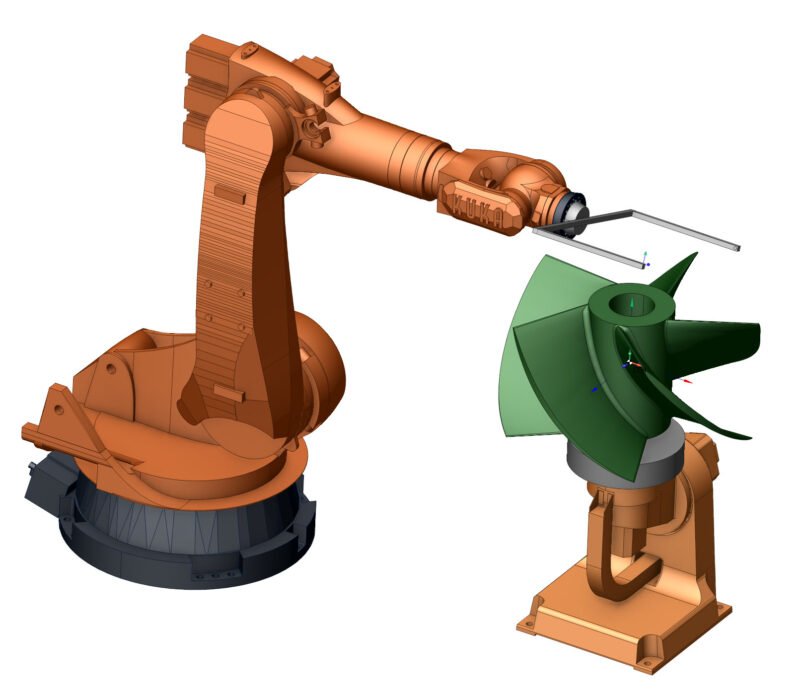
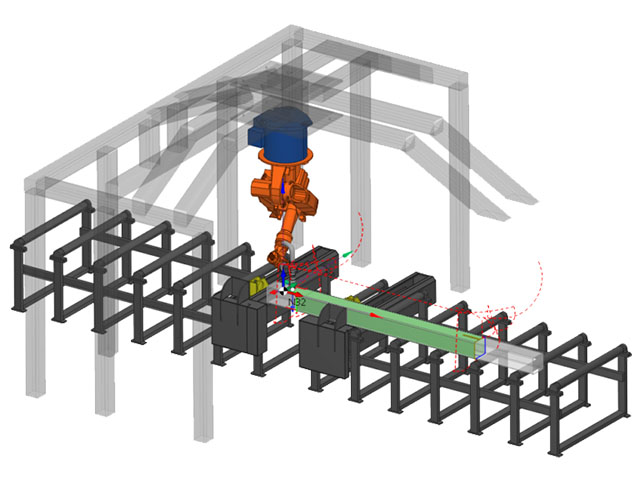
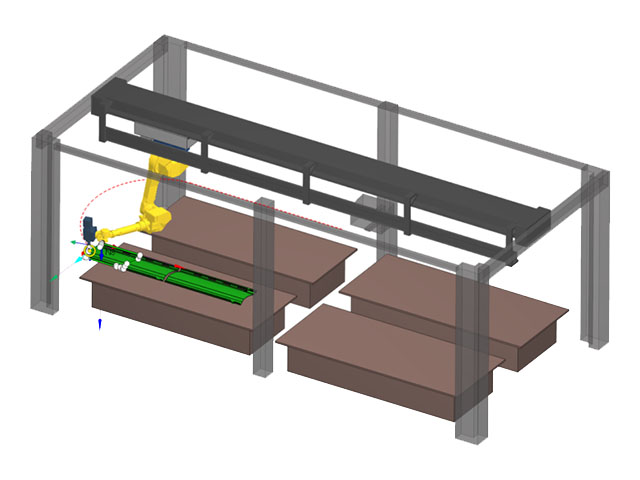
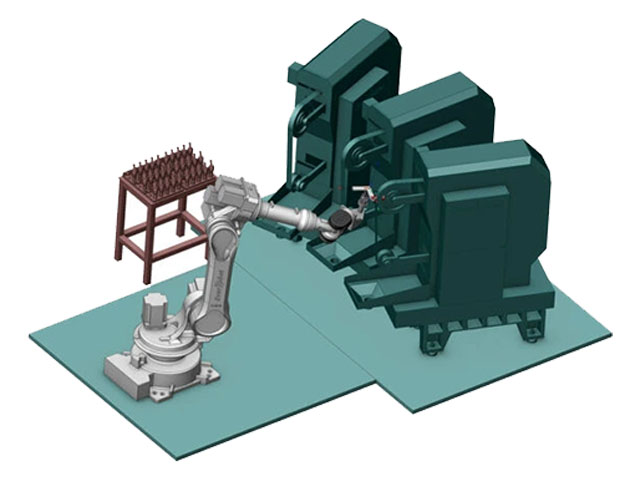
Posizione robot
La programmazione del robot per SprutCAM Robot viene eseguita tenendo conto della posizione e della fissazione del robot nello spazio: montaggio a pavimento / parete / ripiano / soffitto, qualsiasi posizione all’interno di una cella è supportata. Sono consentite entrambe le configurazioni “part to tool” e “tool to part”.
Post processing
I dati di posizione della fresa generati vengono convertiti in codici di comando nativi del robot da un postprocessor. I post-processor standard per tutte le principali marche sono già inclusi e con il generatore di postprocessor incorporato si possono creare nuovi post-processor o modificare quelli già esistenti.